无刷电机控制及电机供电方法
来源:深圳市鑫海文科技有限公司|发布时间:2019-05-29 19:23
无刷电机控制和供电方法,相信很多朋友都不了解,甚至不太清楚无刷电机的控制方法。今天就和大家介绍一下无刷电机控制及电机供电方法。
无刷(BLDC)电机越来越受欢迎是由于使用电子换向。这取代了由在换向器上摩擦的电刷组成的传统机械装置,以激励直流电动机电枢中的绕组。电子换向提供了比传统直流电机更高的效率,对于以相同速度和负载运行的电机,电子换向提高了20%至30%。正如国际能源机构报告的那样,全球40%的电力用于为电动机提供动力,这种效率提升变得引人注目。此外,直流无刷电机更耐用。它保持了高性能,而等效传统电机的效率和功率因磨损而下降,导致电刷接触不良,电刷和换向器之间的电弧消耗能量,以及污垢导致电导率下降。更高的效率使直流无刷电机在给定的功率输出下更小,更轻,更安静,进一步提高了它们在汽车等行业的知名度; 白色家电; 和暖气,通风和空调(HVAC)。直流无刷电机的其他优点包括出色的速度与扭矩特性(启动时的扭矩除外),更动态的响应,无噪音操作和更高的速度范围。
直流无刷电机的缺点是它们的复杂性和相关的成本增加。电子换向需要监控电路,以确保线圈通电的精确定时,以实现精确的速度和转矩控制,并确保电机以最高效率运行。幸运的是,该部门正在迅速成熟,硅供应商现在提供各种高度集成的直流无刷电机驱动器功率MOSFET芯片,其外部或嵌入式微控制器可简化设计流程,同时还可降低组件成本。本文将解释设计人员如何利用这些最新芯片来简化设计过程
直流无刷电机基础知识
所有电动机,无论是机械换向还是电子换向,都遵循将电能转换成机械能的相同基本方法。通过绕组的电流产生磁场,该磁场在存在第二磁场(通常由永磁体引发)的情况下在该绕组上产生力,当其导体与第二场成90°时达到最大值。增加线圈数量可提高电机输出并平滑功率输出。(单片电源系统公司(MPS)已经制作了一份应用笔记(参见参考文献1),它很好地总结了电机的基本概念。)
直流无刷电机通过反转电机设置克服了对机械换向器的要求。绕组成为定子,永磁体成为转子的一部分。定子通常由钢叠片组成,轴向开槽以沿其内周边容纳偶数个绕组。转子由一个轴和一个带有永磁体的轮毂组成,永磁体设置成形成两到八个极对,它们在'N'和'S'之间交替。图1示出了共同磁体布置的一个示例,在这种情况下,两个磁体对直接结合到转子毂。
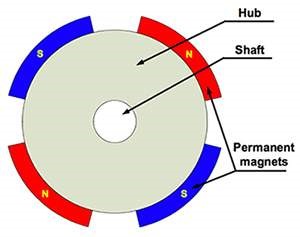
图1:在直流无刷电机中,永磁体连接到转子上。典型配置包括在'N'和'S'极之间交替的2到8对。(礼貌:MPS)
由于绕组是静止的,因此可以建立永久连接以激励它们。为了使固定绕组移动永磁体,绕组需要以受控的顺序通电(或换向)以产生旋转磁场。由于定子产生的旋转磁场使转子以相同的频率旋转,因此BLDC电动机被称为“同步”型。直流无刷电机可以是单相,两相或三相。三相直流无刷电机是最常见的,将成为本文其余部分的主题。
直流无刷电机控制方法
到目前为止,顺序向三相直流无刷电机施加电流的最常见配置是使用以桥接结构排列的三对功率MOSFET,如图2所示。每对控制电机一相的开关。在典型的布置中,使用脉冲宽度调制(PWM)来控制高侧MOSFET,其将输入DC电压转换为调制的驱动电压。PWM的使用允许限制启动电流并提供对速度和扭矩的精确控制。PWM频率是高频时发生的开关损耗与低频时出现的纹波电流之间的折衷,在极端情况下会损坏电机。通常,设计人员使用的PWM频率至少比最大电机转速高一个数量级。
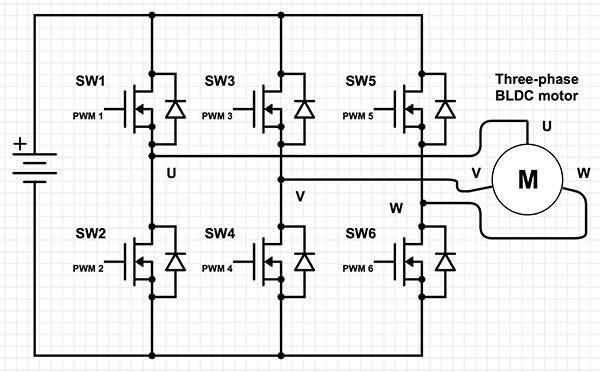
图2:三相直流无刷电机通常由三对MOSFET组成,这些MOSFET以桥式结构排列并由PWM控制。PWM可精确控制电机的速度和扭矩。(使用Digi-Key Scheme-it®绘制的图表)
电子换向有三种控制方案:梯形,正弦和磁场定向控制。梯形技术(在下面的例子中描述)是最简单的。在每一步中,两个绕组通电(一个“高”和一个“低”),而另一个绕组浮动。梯形方法的缺点是这种“阶梯式”换向导致扭矩“波动”,特别是在低速时。正弦控制更复杂,但它减少了扭矩波动。在该控制方案期间,所有三个线圈保持通电,其中每个线圈中的驱动电流彼此正弦变化120°。与梯形技术相比,结果是更平稳的功率输送。磁场定向控制依赖于测量和调整定子电流,使转子和定子磁通之间的角度始终为90°。与其他所有技术相比,该技术在高速下比正弦方法更有效,并且在动态负载变化期间提供更好的性能。几乎没有扭矩波动,可以在低速和高速下实现更平稳,精确的电机控制。
本文将其余的技术讨论限制为梯形技术。
在采用梯形控制方案的电动机中,MOSFET桥式开关必须以精确定义的顺序发生,以使BLDC电动机有效运行。切换顺序由转子磁铁对和定子绕组的相对位置决定。三相直流无刷电机需要六步换向序列才能完成一个电气循环。每个电循环的机械转数由转子上的磁铁对数决定。例如,将需要两个电循环来机械旋转由两对磁体组成的转子一圈。
两种技术为位置反馈提供了解决方案。第一种也是最常见的是使用三个霍尔效应传感器嵌入定子并以相等的间隔排列,通常为60°或120°。第二种“无传感器”控制技术专为需要最少电气连接的直流无刷电机而设计。在配备传感器的直流无刷电机中,每个霍尔效应传感器与一个开关组合,产生逻辑“高”(对于一个磁极)或“低”(对于相反极)信号。通过组合来自霍尔效应传感器和相关开关的逻辑信号来确定换向序列。在任何时候,至少一个传感器由转子的一个磁极触发并产生电压脉冲。
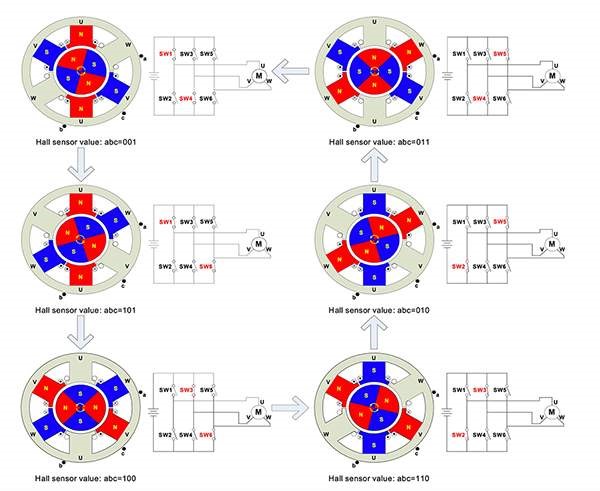
图3示出了逆时针驱动的三相直流无刷电机的换向序列。霍尔效应传感器安装在“a”,“b”和“c”位置。对于换向序列中的每个步骤,一个绕组(“U”,“V”或“W”)由MOSFET桥驱动为高电平,而一个绕组驱动为低电平而第三个绕组悬空。例如,在图的左上方,U为高(形成N极),V为低(S)且W为浮动。由此产生的磁场使转子逆时针移动,因为其永磁体被一个绕组排斥并被下一个绕组吸引。第二阶段(下图)显示绕组U保持高电平,而V切换到浮动状态,W切换为低电平,从而保持磁场的“旋转”并随之移动转子。剩余的换向步骤,一个电气循环,
电子换向序列图
图3:使用MOSFET桥和霍尔效应传感器的三相直流无刷电机的电子换向序列。在这种情况下,转子逆时针驱动,霍尔效应传感器('a','b'和'c')以60°间隔安装。(礼貌:MPS)
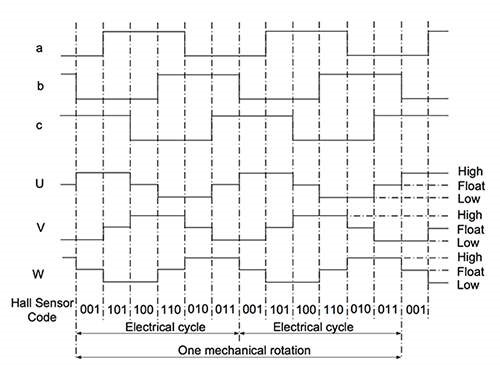
图4显示了相位绕组相对于上面图3所示的逆时针旋转电机的霍尔效应传感器信号的状态。
霍尔效应传感器逻辑开关输出和绕组状态时序图
图4:霍尔效应传感器逻辑开关输出和绕组状态时序图,用于逆时针驱动的三相直流无刷电机。注意至少一个逻辑开关和绕组每60°改变一次状态。(礼貌:MPS)
无传感器BLDC电动机利用电动势(EMF),其产生任何DC电动机的绕组中的电流,其具有与Lenz定律所述的磁通量的原始变化相反的磁场。EMF倾向于抵抗电动机的旋转,因此被称为“后”EMF。对于给定的固定磁通量和绕组数量的电动机,EMF与转子的角速度成比例。
通过监控反电动势,适当编程的微控制器可以确定定子和转子的相对位置,而无需霍尔效应传感器。这简化了电动机结构,降低了成本,并且消除了额外的布线和与电动机的连接,否则将需要支撑传感器,从而提高可靠性。
但是,由于静止电机不产生反电动势,控制器无法确定启动时的电机位置。解决方案是以开环配置启动电机,直到为控制器产生足够的EMF以确定转子和定子位置,然后接管监控。如果电动机用于禁止反向旋转的应用中,则使用更复杂的控制方案。
上面描述的直流无刷电机的每个绕组产生的反电动势显示在图5的下半部分中。这与用于配备有传感器的类似直流无刷电机的霍尔效应传感器逻辑开关输出进行比较。从图中可以看出,绕组中产生的EMF的过零点与逻辑开关的开关状态变化一致。正是这种过零信息,微控制器用于触发无传感器直流无刷电机中换向周期的每个阶段。(参见图书馆文章“ 通过反电动势控制无传感器,直流无刷电机 ”。)
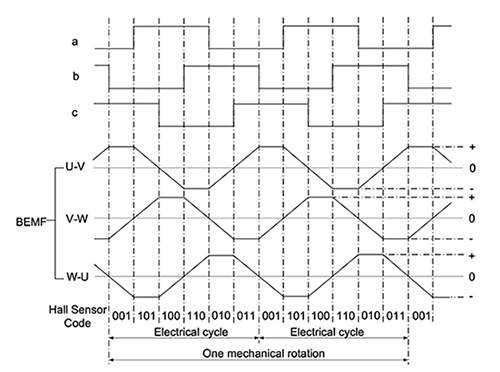
与回绕EMF相比,霍尔效应传感器逻辑开关输出图
图5:霍尔效应传感器逻辑开关输出与绕组反电动势相比,用于逆时针驱动的直流无刷电机。注意用于控制无传感器直流无刷电机的反电动势信息的过零点如何与配备传感器的直流无刷电机中逻辑开关状态的变化一致。(礼貌:MPS)
设计直流无刷电机
虽然涉及直流无刷电机换向的原理,但直流无刷电机功率和控制电路设计不需要。市场上有大量经过验证的集成产品可用作电路的构建模块。包含栅极驱动器或集成MOSFET的BLDC电源模块位于电路的核心。
鑫海文的 A4915三相MOSFET驱动器用作直流无刷电机的六功率MOSFET桥的预驱动器。该设备专为电池供电的产品而设计。节能的一个显着特征是低功耗睡眠模式,可确保设备在不转动电机时消耗最小电流。该器件还具有同步整流功能,这是一种从开关稳压器借来的技术,可降低功耗,无需外部肖特基二极管。
鑫海文还提供用于直流无刷电机的六功率MOSFET桥的预驱动器,但这次是用于汽车,家用电器和业余爱好产品的小型无传感器单元。除了两个低压差(LDO)线性稳压器和一个为MOSFET桥供电的电荷泵外,MCP8025器件还集成了一个降压(“降压”)开关稳压器,为外部控制器供电。
该芯片通过测量浮动绕组的反电动势来保持简单,然后将其与电动机的中性点进行比较。当反EMF越过零点时,过零检测器向主控制器发送信号以指示换向参考点。
德州仪器(TI)的DRV8313通过集成三个可单独控制的半H桥驱动器,更进一步。这种布置的优点在于,除了用于三相直流无刷电机控制之外,该芯片还可用于驱动机械换向电机(使用两个半H桥)或三个独立的螺线管。该芯片可在8至60 V电源下提供高达3.5 A的电流。
DRV8313不包括传感器输入。TI建议,对于传感器或无传感器操作,芯片应与微控制器(如流行的MSP430)配合使用。如图6所示,这种布置为传感的三相BLDC电动机提供了完整的闭环控制系统。
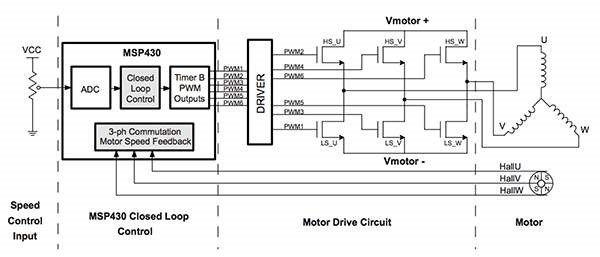
用于传感三相直流无刷电机的完整闭环控制系统图
图6:用于传感三相直流无刷电机的完整闭环控制系统。该电路包括一个模拟速度输入,MSP430微控制器监控功率MOSFET的PWM输出,六MOSFET桥驱动器,MOSFET桥和直流无刷电机。电机定子和转子位置由三个霍尔效应传感器确定,这些传感器将信号馈送到微控制器。(礼貌:德州仪器)
TI提供替代器件DRV8308,它不集成MOSFET。但是,它可以直接从三个霍尔效应传感器输入,因此如果愿意,可以在没有额外微控制器的情况下使用。
虽然霍尔效应传感器是位置反馈的成熟解决方案,但位置传感器技术的发展提供了更高的精度和更高效的换向顺序的前景。例如,ADI公司的ADA4571是一款角度传感器和信号调理器,可以用一个器件取代典型三相直流无刷电机设计的三个霍尔效应传感器。优点是节省空间,并且只需要使用单个信号即可。
ADA4571采用各向异性磁阻(AMR)技术。典型的实施方案是将直径磁化的圆盘安装在直流无刷电机轴的末端(见图7)。盘的磁场穿过传感器的平面,并且在没有机械和电气部件之间接触的情况下确定转子角度。
图7:单个各向异性磁阻传感器可以放置在安装在直流无刷电机轴端的圆盘磁铁附近,取代三个霍尔效应传感器,用于直流无刷电机角度传感,节省空间和简化信号处理。
ADA4571提供与旋转磁场角度相关的放大余弦和正弦输出信号。输出电压范围与电源电压成比例。鑫海文建议将传感器与AD7866 12位ADC结合使用,将ADA4571的模拟信号转换为直流无刷电机驱动控制器或外部微控制器所需的数字信号。
直流无刷电机的电子换向需要精确控制,增加了电机电路的复杂性和成本。然而,效率的回报,例如降低功率,可靠性和空间,以及最终产品的重量减轻,抵消了这些缺点。此外,各种经过验证的集成直流无刷电机驱动器极大地简化了设计过程,同时为设计人员增加了灵活性,可针对特定应用微调设计。
鑫海文长期致力于无刷驱动器方案的研发,高压/低压无刷驱动器的研发生产。鑫海文拥有丰富开发应用经验的专业研发技术团队。选择鑫海文,个性化定制专业解决方案。
本文由鑫海文(www.wsqdfa-bldc.com)原创首发,转载请以链接形式标明本文地址或注明文章出处!





 在线客服
在线客服